

Rinnovare il veccho control box dei rotori Create RC5 con il controller USB di K3NG
La Create, Creative Design Corp., è un’azienda Giapponese che realizza antenne, rotori, tralicci ed accessori per applicazioni professionali e radioamatoriali. I rotori, serie RC5, non sono diffusi come quelli della Yaesu, ma meccanicamente sono più evoluti poiché utilizzano un sistema a vite senza fine con freno automatico e motore in c.a., per sistemi di antenna medio/grandi. Il control box si presenta alla vecchia maniera, con indicatore analogico di direzione a lancetta, commutatore bidirezionale per azionare la rotazione, regolazione della velocità di rotazione, su alcuni modelli il comando di preset. Purtroppo il control box non è dotato della ormai necessaria interfaccia di comunicazione seriale verso il PC, per il controllo automatico tramite software e la lettura della posizione.
Ci viene in auto il collaudato progetto di Anthony K3NG, Arduino Rotator Controller, basato appunto sulla nota scheda di sviluppo Arduino ed ampiamente configurabile per le diverse esigenze di utilizzo. Con una manciata di componenti elettronici e semplici modifiche al control box è possibile rinnovare il sistema, dotandolo di un controller con interfaccia su porta seriale USB e protocollo di comunicazione compatibile con il sistema Yaesu GS-232B.
Controller K3NG
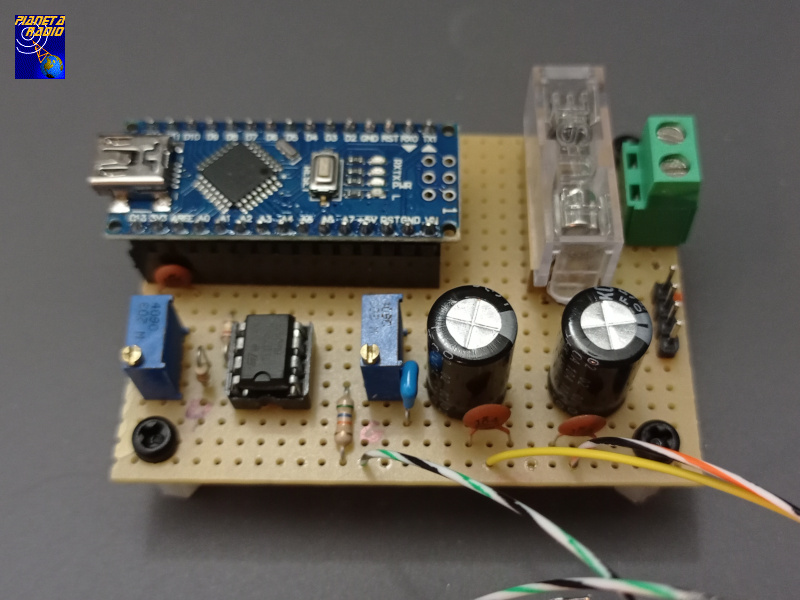
Il controller è basato sulla scheda Arduino, uno stadio analogico con amplificatore operazionale per la lettura della posizione ed una scheda relé per l’azionamento del motore. Quest’ultima trova posto all’interno del control box del rotore, mentre il resto dell’interfaccia è collocata all’esterno. Nella figura seguente è riportato lo schema elettrico (cliccandoci sopra si scarica il file pdf).
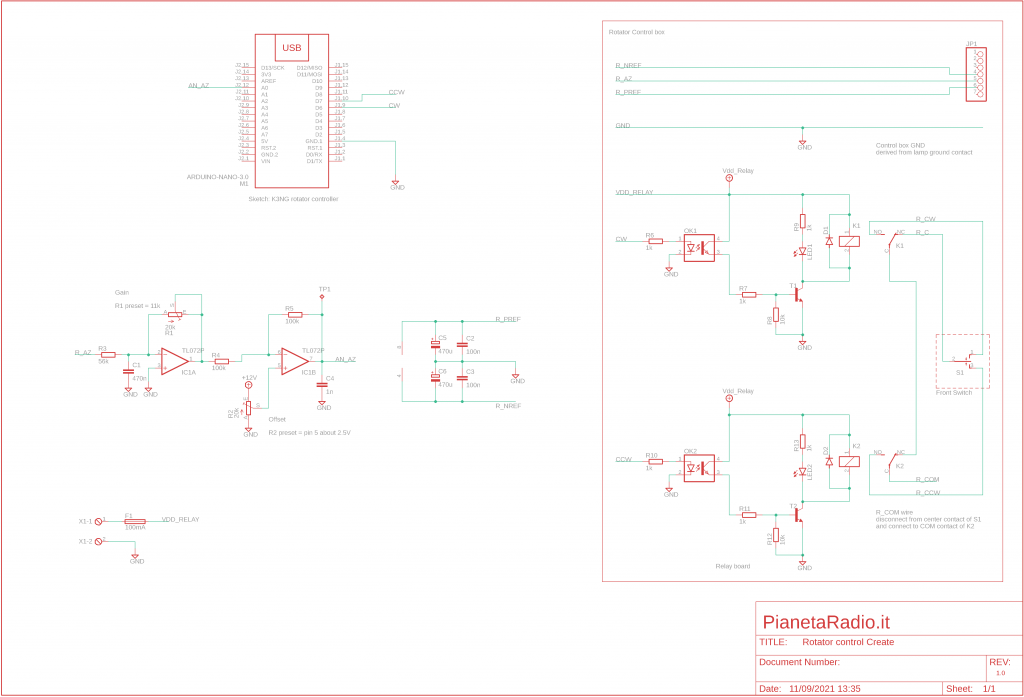
Il controller Arduino è configurato per leggere la posizione analogica dal pin A0 e azionare la rotazione tramite le uscite digitali D6 e D7, l’alimentazione avviene dalla porta USB tramite il PC a cui è collegato. Lo sketch già configurato è scaricabile più avanti. Per ulteriori dettagli sul funzionamento vi rimando alla pagina wiki del progetto di K3NG.
La parte custom del circuito è lo stadio analogico, costruito intorno ad IC1, che adatta il livello di tensione -12,+12V letto dal potenziometro di posizione inserito all’interno del rotore, al range 0,+5V accettato dal converitore A/D del microcontrollore. I segnali sono prelevati dalla morsettiera posteriore del control box, indicata in schema come JP1. Le tensioni di riferimento R_PREF ed R_NREF vanno ad alimentare l’amplificatore operazionale di questo stadio, dopo essere state opportunamente livellate e filtrate dal gruppo di condensatori C2, C3, C5 e C6. Il primo operazionale scala la tensione nel range -2.5,+2.5V e il secondo aggiunge un offset per portarlo nel giusto range. La regolazione fine avviene tramite i trimmer multigiro R1 ed R2.
La scheda relé del tipo optoisolata ad attivazione con comando logico alto, si può acquistare già pronta o costruita secondo lo schema riportato. L’alimentazione dei relé avviene tramite una tensione esterna VDD_RELAY protetta da fusibile.
Download
Poiché non è semplice configurare lo sketch Arduino rotator controller di K3NG, qui in basso è possibile scaricarlo già pronto e personalizzato per il control box Create:
| Versione | Data | Changelog |
|---|---|---|
| ControllerCreate_1.0 | 02/09/2021 | Prima release (basato su K3NG v.2021.03.20.01) |
Modifica control box
All’interno del control box vanno apportate alcune semplici modifiche e prelevati i segnali necessari al controller esterno.
Dopo aver smontato il coperchio e il frontale, sistemare all’interno la scheda relé. Dissaldare dal commutatore di rotazione il filo comune, eseguire le connessioni con i contatti dei due relé come riportato nello schema elettrico, collegandosi in parallelo gli altri due fili del commutatore per lasciare inalterato il funzionamento manuale del control box. Lo schema di connessione potrebbe sembrare complicato, ma è necessario per interdire l’azionamento nei due versi opposti della rotazione.
Predisporre verso l’esterno i fili di comando per l’azionamento dei relé. Prelevare il segnale di GND dal contatto delle lampadine di illuminazione come riportato in foto. Prelevare i segnali di posizione del rotore dalla morsettiera posteriore come indicato sullo schema elettrico. Tutti questi segnali vanno verso il controller Arduino e possono essere portati all’esterno con fili volanti o posizionando un apposito connettore sul retro del control box.
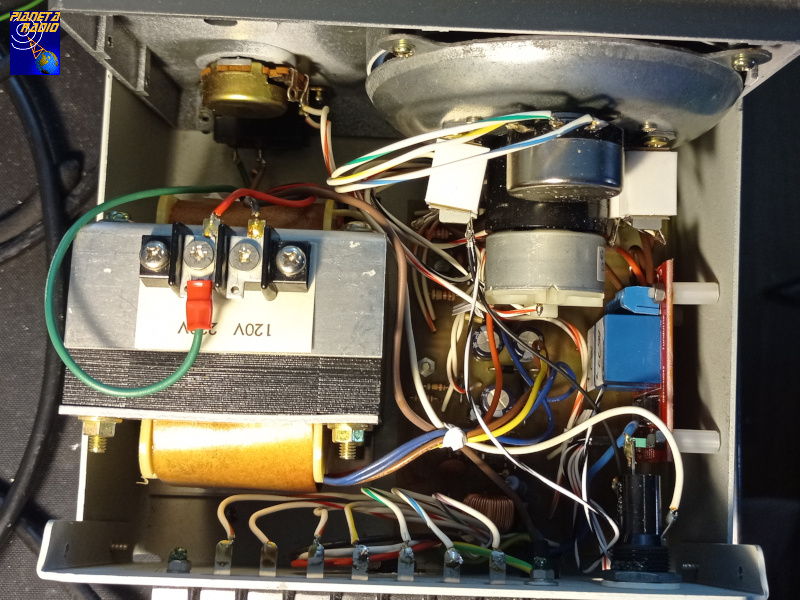
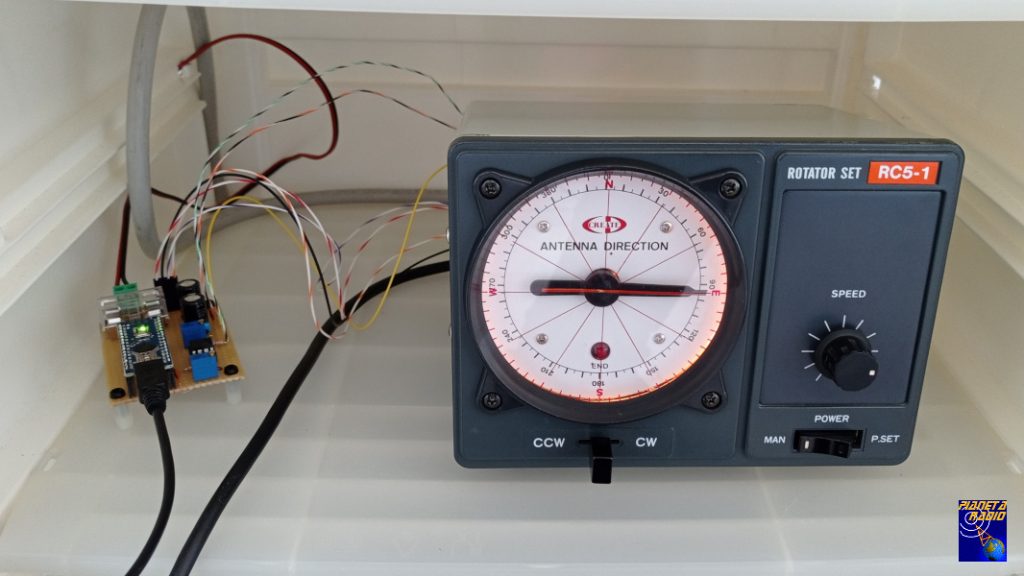
Control box rotore Create 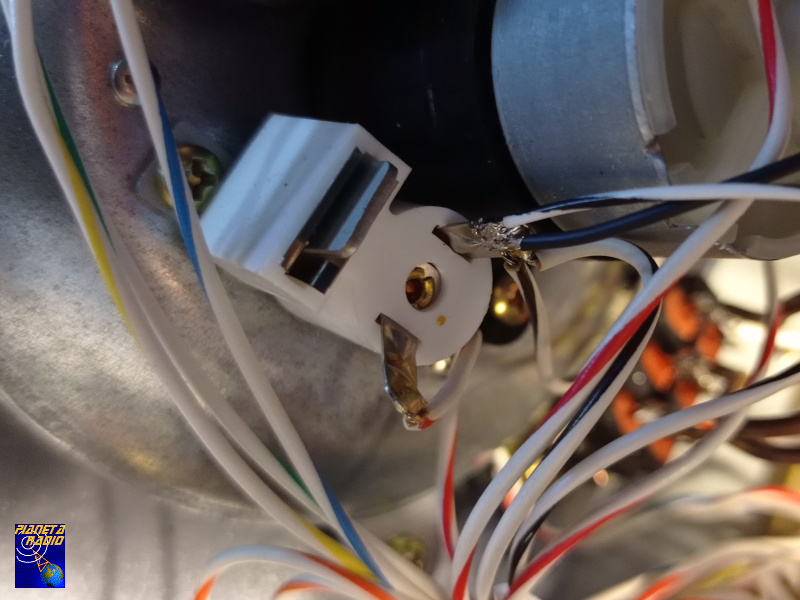
Control box rotore Create – GND 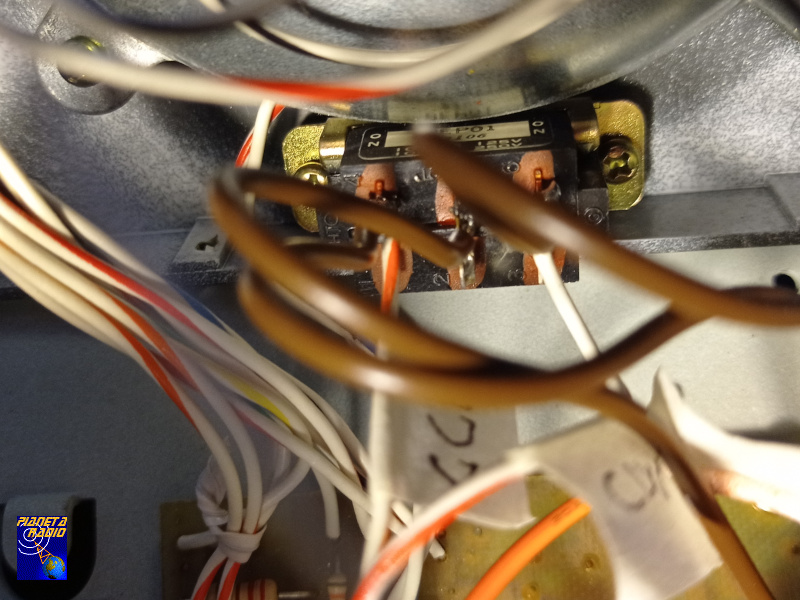
Control box rotore Create – Commutatore 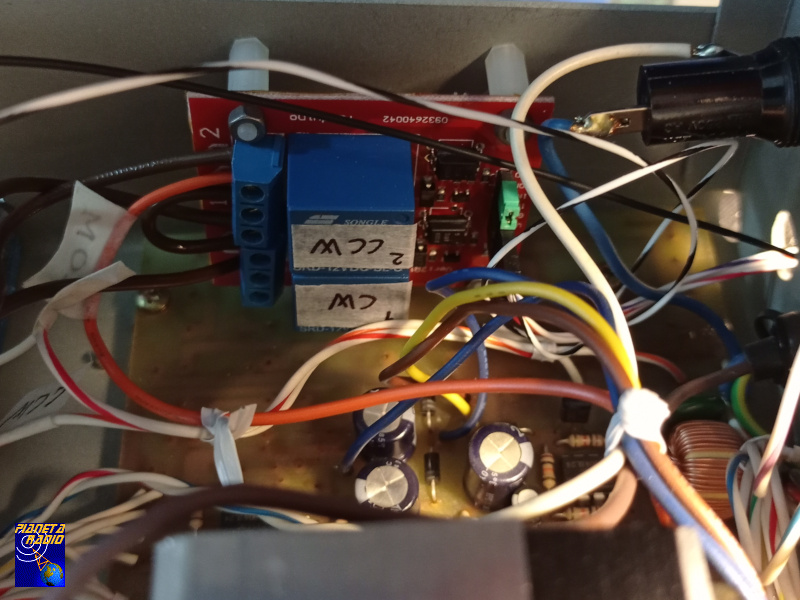
Control box rotore Create – Relé
NOTA: La modifica si riferisce ad una versione molto vecchia del rotore, dal manuale che ho reperito in rete la versione attuale sembrerebbe essere leggermente diversa, sia come disposizione dei circuiti interni che a livello di schema elettrico, ma non dovrebbero esserci problemi all’installazione del controller. In particolare dagli schemi, pare che attualmente la tensione di riferimento applicata la potenziometro di posizione sia 0,+5V e non -12,+12V come sul vecchio modello. In tal caso lo stadio d’ingresso analogico del controller potrebbe essere rimosso e il segnale prelevato dal pin 5 della morsettiera fornito direttamente in ingresso al pin A0 di Arduino, previo opportuno filtraggio.
Taratura
Con modulo Arduino spento e quindi scollegato dalla USB, predisporre il trimmer di gain R1 ad un valore di circa 11kohm tra i pin 1 e 2 di IC1, accendere il control box e regolare il trimmer di offset R2 misurando circa 2.5V tra il pin 5 di IC1 e GND.
Ruotare manualmente l’antenna a fine corsa in verso orario CW ed effettuare la regolazione fine di R1 per avere 2.5V sul pin 1 di IC1, ritoccare R2 per leggere una tensione di 5V sul pin 7.
Ruotare l’antenna a fine corsa in verso antiorario CCW e verificare che la tensione sul pin 7 sia poco maggiore di 0V, altrimenti ritoccare R1. Ripetere il procedimento se necessario.
A questo punto collegare Arduino alla porta USB, individuare la numerazione assegnata alla porta seriale ed aprire un terminale seriale a 9600 8N1. Dare il comando C per verificare che l’interfaccia risponda inviando la lettura in gradi della posizione dell’antenna.
Effettuare la taratura del software inviando il comando O, quindi ruotare manualmente il rotore in verso antiorario in posizione 180° e premere invio. Dare il comando F, ruotare manualmente il rotore in verso orario su 180° e premere invio. La calibrazione è terminata.
Con il comando Mxxx muovere l’antenna in diverse posizioni, controllando sull’indicatore del control box che si fermi nella direzione desiderata.
Lo sketch è configurato con lo stop a sud, ma se il rotore è predisposto diversamente l’impostazione si può cambiare utilizzando il comando Z.
Conclusioni
Il rotore si presenta ora rinnovato e pronto per essere controllato automaticamente da PC, tramite gli appositi software che supportano il protocollo GS-232B.
La lettura riportata dal controller non è molto puntuale, quindi l’antenna non si ferma esattamente nella direzione desiderata, ma c’è uno scarto fino ad una decina di gradi, che per sistemi VHF o bande superiori può rappresentare un forte inconveniente. Questo comportamento è dovuto alle limitazioni costruttive del control box, una su tutte le due tensioni di riferimento R_PREF ed R_NREF che non sono stabilizzate, ma potrebbe anche dipendere dal potenziometro di lettura della posizione posto nel rotore nel caso in cui sia molto usurato.
Riferimenti
Argomenti correlati
 Questa opera è distribuita con:
Questa opera è distribuita con:
licenza Creative Commons Attribuzione - Non commerciale - Condividi allo stesso modo 3.0 Italia.
Si declina ogni responsabilità per eventuali errori ed omissioni e gli eventuali danni che ne dovessero conseguire. Per ulteriori informazioni consultare le note legali.